
基于NanoPi的声音传感器驱动开发
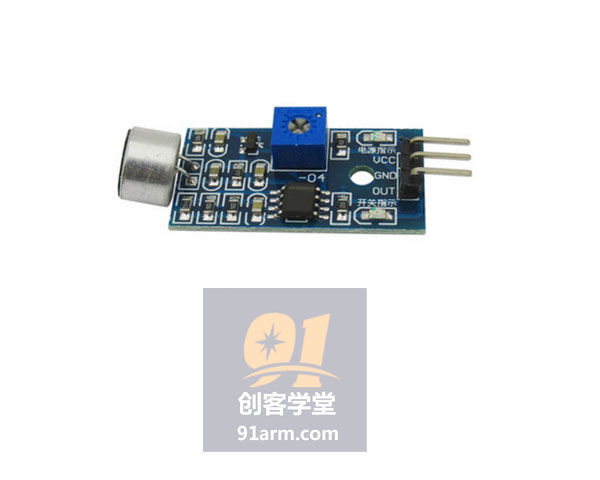
声音传感器模块
模块电路图

产品特点
1.可以检测周围环境的声音强度,使用注意:此传感器只能识别声音的有无(根据震动原理)不能识别声音的大小或者特定频率的声音
2.灵敏度可调(图中蓝色数字电位器调节)
3.工作电压3.3V-5V
5.输出形式 数字开关量输出(0和1高低电平)
6.设有固定螺栓孔,方便安装
7.小板PCB尺寸:3.2cm * 1.7cm
模块接线说明
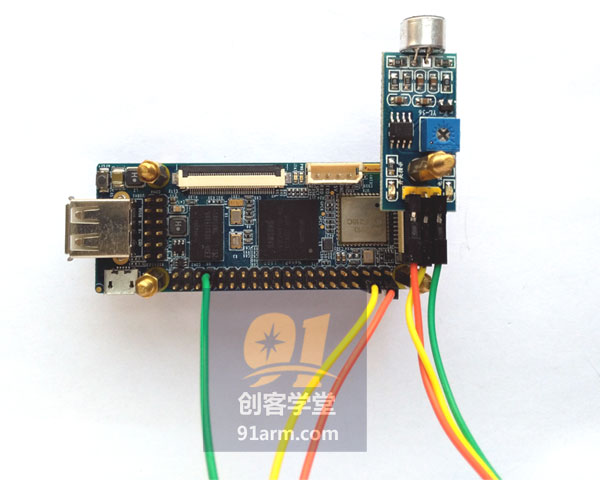
1.VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
2.GND 外接GND
3.OUT 小板开关量输出接口(0和1)
使用说明
1.声音模块对环境声音强度敏感,一般用来检测周围环境的声音强度。
2.模块在环境声音强度达不到设定阈值时,OUT输出高电平,当外界环境声音强度超过设定阈值时,模块OUT输出低电平;
3.小板数字量输出OUT可以与单片机直接相连,通过单片机来检测高低电平,由此来检测环境的声音;
模块与NanoPi连接图
模块驱动程序
#include <linux/miscdevice.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/types.h>
#include <linux/delay.h>
#include <linux/moduleparam.h>
#include <linux/slab.h>
#include <linux/errno.h>
#include <linux/ioctl.h>
#include <linux/cdev.h>
#include <linux/string.h>
#include <linux/uaccess.h>
#include <linux/list.h>
#include <linux/clk.h>
#include <linux/io.h>
#include <linux/gpio.h>
#include <plat/gpio-cfg.h>
#include <mach/gpio-samsung.h>
#define DEVICE_NAME "2451_mic"
//nanopi2451
#define LGPIO S3C2410_GPG(6) //模块GPIO脚
static int mic_read(struct file *file, char * buffer, size_t count, loff_t * ppos)
{
unsigned tmp;
unsigned long err;
tmp = gpio_get_value(LGPIO);
// printk("==%d==\n",tmp);
err = copy_to_user(buffer, &tmp, 1);
return 1;
}
static struct file_operations dev_fops={
read:mic_read,
};
static struct miscdevice misc = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &dev_fops,
};
static int __init my_mic_init(void)
{
int ret;
s3c_gpio_cfgpin(LGPIO, S3C_GPIO_SFN(0));
s3c_gpio_setpull(LGPIO, S3C_GPIO_PULL_DOWN);
ret = misc_register(&misc);
printk (DEVICE_NAME"\tinitialized\n");
return ret;
}
static void __exit my_mic_exit(void)
{
misc_deregister(&misc);
}
module_init(my_mic_init);
module_exit(my_mic_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("TONY www.91arm.com");
驱动测试程序
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <errno.h>
#define DEV_FILE "/dev/2451_mic"
int main()
{
int fd_dev=-1;
char dat;
int time=1000,ms,count=0;
printf("nanoPi driver Test\n");
fd_dev = open(DEV_FILE,O_RDWR);
if(fd_dev<0){
printf("open device err\n");
return 0;
}
printf("input ms:");//控制检测时间间隔多少ms
scanf("%d",&ms);
time = time * ms;
while(1){
read(fd_dev,&dat,1);
if(dat==0)
count++;//统计声响次数
printf("MIC status [%d],count=%d\n",dat,count);
usleep(time);
}
return 0;
}
Copyright © 2016 www.91arm.com 【91创客学堂】