
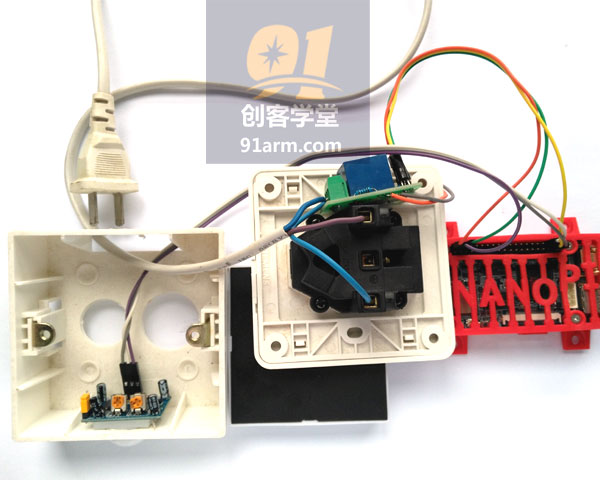
基于ARM的智能灯光控制系统(10)网络节点
节点设备
网络通信协议
//–head– cmd data crc
//0x5a 0x15 0x 0x 0x
| 协议头部(2字节) | 命令位(1字节) | 数据位(1字节) | 校验位(1字节) | 功能 |
|---|---|---|---|---|
| 0x5a 0x15 | 0x10 | 0x11 | 前四位求和 | 查询设备在线 |
| 0x5a 0x15 | 0x20 | 0x21 | 前四位求和 | 在线 |
| 0x5a 0x15 | 0x30 | 0x31 | 前四位求和 | 设备开 |
| 0x5a 0x15 | 0x30 | 0x32 | 前四位求和 | 设备关 |
| 0x5a 0x15 | 0x30 | 0x33 | 前四位求和 | 设备自动开关 |
主控端网络程序(net_pro.c)
net_por.h
#ifndef __SL2000_NET_H_
#define __SL2000_NET_H_
#define DEF_PORT 6899
int socket_init(int port);
void* client_pro(void* arg);
void* net_pro(void* arg);
int send_cmd(char cmd, char cmd_da ,int sockfd);
int get_cmd(char *buf,char* cmd,int len);
#endif
#include <errno.h>
#include <netdb.h>
#include <netinet/in.h>
#include <sys/socket.h>
#include <pthread.h>
#include "config.h"
#include "net_pro.h"
int net_user;
unsigned char net_cmd;
unsigned char net_flag;
extern struct sys_all g_dev[1];
extern struct dev_fd g_dev_fd;//系统设备文件
int socket_init(int port)
{
int sockfd;
struct sockaddr_in server_addr;
if((sockfd=socket(AF_INET,SOCK_STREAM,0))==-1){
fprintf(stderr,"Socket error:%s\n\a",strerror(errno));
exit(1);
}
printf("socket...\n");
bzero(&server_addr,sizeof(struct sockaddr_in));
server_addr.sin_family=AF_INET;
server_addr.sin_addr.s_addr=htonl(INADDR_ANY);
server_addr.sin_port=htons(port);
if(bind(sockfd,(struct sockaddr *)(&server_addr),sizeof(struct sockaddr))==-1)
{
fprintf(stderr,"Bind error:%s\n\a",strerror(errno));
exit(1);
}
printf("bind...\n");
if(listen(sockfd,10)==-1)
{
fprintf(stderr,"Listen error:%s\n\a",strerror(errno));
exit(1);
}
printf("listen...\n");
return sockfd;
}
//protocol
//--head-- cmd data crc
//0x5a 0x15 0x 0x 0x
int get_cmd(char *buf,char* cmd,int len)
{
char crc=0;
int i;
if(buf==NULL || cmd==NULL || len !=5 )
return -1;
if(buf[0] != 0x5a || buf[1] != 0x15)
return -1;
for(i=0;i<len-1;i++){
crc += buf[i];
}
if(crc != buf[len-1])
return -1;
cmd[0] = buf[2];
cmd[1] = buf[3];
return 0;
}
int send_cmd(char cmd, char cmd_da ,int sockfd)
{
unsigned char buf[8];
if(sockfd < 0)
return -1;
buf[0] = 0x5a;
buf[1] = 0x15;
buf[2] = cmd;
buf[3] = cmd_da;
buf[4] = buf[0] + buf[1] + buf[2] + buf[3];
if(send(sockfd,buf,5,0)==-1){
fprintf(stderr,"Write Error:%s\n",strerror(errno));
return -1;
}
return 0;
}
void* client_pro(void* arg)
{
int fd,*p;
int len,index;
int timer=0;
unsigned char recv_buf[8],cmd[8],old_cmd;
p=(void*)arg;
fd = *p;
net_user++;
index = net_user - 1;
net_flag= 1;//在线
g_dev_fd.net_fd[index] = fd;
old_cmd = net_cmd;
while(1){
bzero(recv_buf,8);
bzero(cmd,8);
if(timer == 3){
timer = 0;
send_cmd(0x10, 0x11, fd); //查询设备在线
len = recv(fd,recv_buf,8,0);
if(len==0 || len==-1){
net_user--;
close(fd);
net_flag = 0;//下线
g_dev_fd.net_fd[index] = -1;
pthread_exit("0");
}else{
get_cmd(recv_buf,cmd, len);
if(cmd[0]==0x20 && cmd[1]==0x21)
net_flag = 1;
else
net_flag = 0;
//printf("\nbuf=%x,%x,%x,%x,%x=cmd=%x,%x=\n",
// recv_buf[0],recv_buf[1],recv_buf[2],recv_buf[3],
// recv_buf[4],cmd[0],cmd[1]);
}
}
if(old_cmd != net_cmd){
old_cmd = net_cmd;
send_cmd(0x30, old_cmd,fd);
}
sleep(1);
timer++;
}
}
void* net_pro(void* arg)
{
pthread_t pth;
int sockfd,new_fd,sin_size;
struct sockaddr_in client_addr;
printf("net server pthread start...\n");
sockfd = socket_init(DEF_PORT);
printf("sockfd=%d\n",sockfd);
while(1){
printf("accept before...\n");
sin_size=sizeof(struct sockaddr_in);
new_fd=accept(sockfd,(struct sockaddr*)(&client_addr),&sin_size);
if(new_fd==-1){
fprintf(stderr,"Accpet error:%s\n\a",strerror(errno));
pthread_exit("0");
}
fprintf(stderr,"Sever from %s\n",inet_ntoa(client_addr.sin_addr));
if(net_user<MAX_NET){
pthread_create(&pth,NULL,client_pro,(void*)&new_fd);
}
}
}
节点端网络程序(net_light.c)
#include<stdio.h>
#include<stdlib.h>
#include<errno.h>
#include<string.h>
#include<netdb.h>
#include<fcntl.h
#include<sys/socket.h>
#include<sys/types.h>
#include<netinet/in.h>
#define DEV_RELAY "/dev/4418_relay"
#define DEV_PIR "/dev/4418_pir"
#define J1_OFF 0x01
#define J1_ON 0x00
#define BUF_SIZE 32
int fd_relay=-1,fd_pir = -1;
int dev_init()
{
printf("nanoPi driver init...\n");
fd_relay = open(DEV_RELAY,O_RDWR);
if(fd_relay<0){
printf("open device err\n");
return -1;
}
fd_pir = open(DEV_PIR,O_RDWR);
if(fd_pir<0){
printf("open device err\n");
return -1;
}
}
int net_init(char* ip ,char* port_str)
{
int sockfd,port;
struct sockaddr_in server_addr;
port = atoi(port_str);
if(port<1024){
printf("port error\n");
return -1;
}
if((sockfd=socket(AF_INET,SOCK_STREAM,0))==-1){
fprintf(stderr,"Socket Error:%s\a\n",strerror(errno));
return -1;
}
bzero(&server_addr,sizeof(server_addr));
server_addr.sin_family=AF_INET;
server_addr.sin_port=htons(port);
server_addr.sin_addr.s_addr=inet_addr(ip);
if(connect(sockfd,(struct sockaddr *)(&server_addr),sizeof(struct sockaddr))==-1){
fprintf(stderr,"Connect Error:%s\a\n",strerror(errno));
return -1;
}
return sockfd;
}
void dev_sw(int sw)
{
char da[2];
if(sw == 3){
read(fd_pir,da,1);
write(fd_relay,da,1);
}else{
if(sw == 1)
da[0] = J1_ON;
if(sw == 2)
da[0] = J1_OFF;
write(fd_relay,da,1);
}
printf("==sw=%d==\n",sw);
}
//protocol
//--head-- cmd data crc
//0x5a 0x15 0x 0x 0x
int get_cmd(char *buf,char* cmd,int len)
{
char crc=0;
int i;
if(buf==NULL || cmd==NULL || len !=5 )
return -1;
if(buf[0] != 0x5a || buf[1] != 0x15)
return -1;
for(i=0;i<len-1;i++){
crc += buf[i];
}
if(crc != buf[len-1])
return -1;
cmd[0] = buf[2];
cmd[1] = buf[3];
return 0;
}
int cmd_proc(char * cmd,int sockfd)
{
char buf[8];
buf[0] = 0x5a;
buf[1] = 0x15;
if(cmd == NULL || sockfd < 0)
return -1;
if(cmd[0] == 0x10){
buf[2] = 0x20;
buf[3] = 0x21;
buf[4] = buf[0] + buf[1] + buf[2] + buf[3];
if(send(sockfd,buf,5,0)==-1){
fprintf(stderr,"Write Error:%s\n",strerror(errno));
}
}
if(cmd[0] == 0x30){
switch(cmd[1]){
case 0x31://on
dev_sw(1);
break;
case 0x32://off
dev_sw(2);
break;
case 0x33://auto
dev_sw(3);
break;
}
}
return 0;
}
int main(int argc, char *argv[])
{
int sockfd = -1 ;
int nbytes = 0;
char recv_buf[BUF_SIZE],cmd[2];
if(argc < 3){
printf("please input server IP,PORT.\n");
exit(0);
}
if( dev_init() < 0)
exit(0);
if( (sockfd = net_init(argv[1],argv[2])) < 0)
exit(0);
while(1){
bzero(recv_buf,BUF_SIZE);
bzero(cmd,2);
if((nbytes=recv(sockfd,recv_buf,BUF_SIZE,0))==-1){
fprintf(stderr,"Read Error:%s\n",recv_buf);
exit(1);
}
if(nbytes >= 5){
if(get_cmd(recv_buf,cmd,nbytes)==0)
cmd_proc(cmd,sockfd);
printf("\nbuf=%x,%x,%x,%x,%x=cmd=%x,%x=\n",
recv_buf[0],recv_buf[1],recv_buf[2],recv_buf[3],
recv_buf[4],cmd[0],cmd[1]);
}
// sleep(1);
}
return 0;
}
Copyright © 2016 www.91arm.com 【91创客学堂】